7月7日,首届“禾多未来日”活动在武汉圆满举行。本届活动以“A Robotic State of Mind”为主题,邀请到国内外机器人领域的著名学者与行业领袖,为武汉高校师生带来移动机器人领域最前沿的技术理论知识和科技研发应用,探讨如何应对移动机器人技术面临的产业化挑战。禾多未来日由自动驾驶量产解决方案先行者——禾多科技主办,旨在促进学术和产业的交流和合作。
据悉,多名享誉国内外的学术界、产业界的知名专家出席了本次活动,包括:中国工程院院士、清华大学自动化系教授、生命科学学院客座教授戴琼海院士,美国佐治亚理工学院终身教授、禾多科技首席3D视觉科学家Frank Dellaert,香港科技大学电子与计算机工程系助理教授沈劭劼,韩国科学技术院机器人与土木环境工程学院助理教授Ayoung Kim,上海科技大学信息科学与技术学院助理教授及研究员Laurent Kneip,浙江大学教授、国家优秀青年科学基金获得者章国锋,清华大学计算机系、智能技术与系统国家重点实验室特别研究员刘华平,阿里巴巴人工智能实验室研发总监李名杨,TÜV南德意志大中华集团、南德认证检测(中国)有限公司大中华区经理赵欣等。
主题演讲精彩纷呈,共话移动机器人新趋势
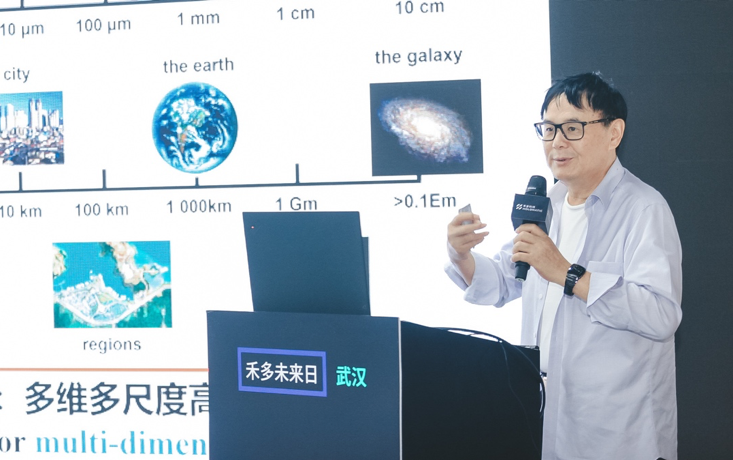 中国工程院院士,清华大学自动化系教授、生命科学学院客座教授戴琼海院士
中国工程院院士,清华大学自动化系教授、生命科学学院客座教授戴琼海院士
中国工程院院士、清华大学自动化系教授、生命科学学院客座教授戴琼海院士以“探索人工智能新方向——光场视觉”为题发表了演讲。目前广泛应用于智能系统的视觉成像单元大多数基于单目或双目,难以超越人眼所具有的多维多尺度成像能力,在时间、空间、角度、光谱、动态范围等多个维度的成像能力受限,从而限制了诸如L5级别自动驾驶等移动机器人研究和应用的开展。戴院士及团队深耕计算摄像学领域多年,其研究的第三代非结构化多尺度相机阵列能够做到集中分布式的标定,突破景深与空间分辨率之间的矛盾,实现360度、远距离、高分辨率、动态深度的计算,真正做到“看得全、看得清、看得见”。同时,戴院士及其团队还介绍了其正在研究的基于光电计算的第四代视觉系统,通过光信号在材料传输过程中的衍射和干涉进行计算,一旦应用在自动驾驶中,能够很好地应对自动驾驶大量场景下的计算功耗问题。

美国佐治亚理工学院终身教授、禾多科技首席3D视觉科学家Frank Dellaert
美国佐治亚理工学院终身教授、禾多科技首席3D视觉科学家Frank Dellaert以“基于因子图和自动微分法的推论在机器人及计算机视觉中的广泛应用“为题发表了演讲。在机器人学和计算机视觉中,同步定位与建图(Simultaneous Localization Mapping,简称SLAM)和运动结构 (Structure from Motion,简称SFM)是重要而又紧密相关的问题。Frank Dellaert教授回顾了因子图(Graph Factor)在SLAM、SFM以及机器人和视觉领域的应用,展示了因子图批处理和增量处理算法,以及在复杂的轨迹处理中的巨大优势。

香港科技大学电子与计算机工程系助理教授沈劭劼
香港科技大学电子与计算机工程系助理教授沈劭劼教授以“复杂环境中的三维视觉感知——状态估计、三维重建和动态目标感知”为题发表了演讲,他和他的团队致力于让无人机在低成本、小体积的前提下,实现在复杂的环境中自主运行。同时,他们也在研究自动驾驶中包括姿态估计、动态物体的检测与跟踪、车辆动作预测以及路径规划等课题。

韩国科学技术院机器人与土木环境工程学院助理教授Ayoung Kim
韩国科学技术院机器人与土木环境工程学院助理教授Ayoung Kim以“城市环境中基于感知的SLAM技术”为题发表了演讲。Kim教授及其团队进行了基于激光雷达和摄像头的SLAM算法研究,致力于提高无人驾驶汽车在城市复杂环境中安全行驶的能力。他们通过2D和3D激光雷达进行测量和地图构建,形成复杂的城市地图数据。同时,也在研究如何更好地对物体进行外部标定,以及基于相机激光雷达和热激光雷达的多模态SLAM技术。

上海科技大学信息科学与技术学院助理教授及研究员Laurent Kneip
上海科技大学信息科学与技术学院助理教授及研究员Laurent Kneip以“三维空间人工智能:更高级、嵌入式表达的SLAM技术”为题发表了演讲。他认为,三维空间人工智能(Spatial AI)是一种更高层次的表达法,它结合了几何信息,语义信息和目标对象信息来理解场景。它不再重建部分环境,而是利用语义信息(比如先验形状)重建目标物体,是一种真正由数据驱动的SLAM架构。
浙江大学教授、国家优秀青年科学基金获得者章国锋
浙江大学教授、国家优秀青年科学基金获得者章国锋教授以“视觉SLAM技术和AR应用”为题发表演讲。他认为,基于单一传感器的SLAM会有局限性,所以未来多传感器融合是必然的趋势,比如手机目前装有相机和IMU,而移动机器人可以有更多的传感器,像自动驾驶系统里一般都应用到了相机、LiDAR、GPS、IMU、里程计等传感器。每个传感器都有各自的优点和缺点,只使用一种传感器必然有很大的局限性,而通过SLAM技术融合多种传感器能够达到稳定、高精度的定位。章教授及其团队目前主要的工作主要是SLAM在AR、VR上的应用,接下来也希望能在机器人、自动驾驶方向进行更多的研究。

清华大学计算机系、智能技术与系统国家重点实验室特别研究员刘华平
清华大学计算机系、智能技术与系统国家重点实验室特别研究员刘华平以“多模态主动环境感知深度强化学习方法”为题发表了演讲。他研究的对象主要是应用机器人和操作机器人。在实际场景中,机器人主要通过视觉、听觉、触觉这三种综合模态进行感知。而机器人多模态信息融合的本质困难在于,视-听-触觉多模态数据具有不同的表示形式和感知范围,但却不具有一一对应的匹配特性。如何针对这种异构的多模态数据去实现融合,以及引入主动感知后,如何把感知和动作这两个回路高度非线性地融合刻画出来,是刘华平研究员及其团队主要在解决的问题。
产学研跨界合作,共同推进移动机器人产业落地
活动最后,特设圆桌讨论环节,围绕“移动机器人技术的产业化挑战”的话题展开讨论。讨论嘉宾包括:浙江大学教授章国锋、佐治亚理工学院终身教授Frank Dellaert,阿里巴巴人工智能实验室研发总监李名杨,禾多科技创始人兼CEO倪凯,TÜV南德意志大中华集团,南德认证检测(中国)有限公司大中华区经理赵欣。

嘉宾围绕“移动机器人技术的产业化挑战”的话题展开讨论
对于目前移动机器人的技术进展以及产业化程度,李名杨表示,目前产业化机器人大多只是完成单一的任务,下一步可以把不同的技术放在一起,实现机器人多功能化。
Frank Dellaert教授则认为,衡量移动机器人技术的成熟度要看具体的产品和场景,比如当无人机的任务是跟随用户进行拍摄,目前的技术对于该应用场景而言就是成熟的;而谈及自动驾驶,想要保证安全可靠并让消费者为技术买单,对技术成熟性的标准就会非常高。
倪凯进一步提出了软硬件碎片化问题。在不同的垂直领域,硬件的碎片化导致了算法的碎片化,每个做机器人的机构都会研究自有的机器人执行机构,在此基础上大家做SLAM、感知、决策也非常不一样。
赵欣则认为,要实现产业化,必须满足需求、商业模式、产业政策和标准四个前提。传统的工业机器人的标准更多针对机械类,但是移动机器人更多是软件方面,软件质量、软件安全等都是需要考虑的因素。
移动机器人是一门综合的交叉学科,涉及到了计算机科学、机械工程、电子工程等多门学科,集软硬件于一体,横跨产学研领域。章国锋教授直言,依靠高校的课题组去直接做一个产品级的东西是非常困难的,要将技术成果快速落地,需要与企业合作。产学研融合,需要大家发挥好各自的优势,高校和科研院所擅长做理论和前沿探索性的研究,企业则更了解实际应用需求,而且工程开发能力通常比较强,双方紧密合作,甚至在一起工作,会产生1+1大于2的效果,能够实现技术的快速落地。
据了解,本次活动的主办方禾多科技创立于2017年6月,公司基于前沿人工智能技术和汽车工业技术研发自动驾驶系统,拥有全栈研发能力,具备从车辆线控、底层多传感器技术到上层自动驾驶核心算法模块的完整布局。禾多科技以促进自动驾驶技术产业化落地为目标,目前聚焦高速公路和代客泊车两大应用场景,打造由本地数据驱动的自动驾驶量产解决方案。禾多于年初设立武汉研究院,并已与武汉大学等高校展开合作,针对自动驾驶相关课题进行前瞻研究。